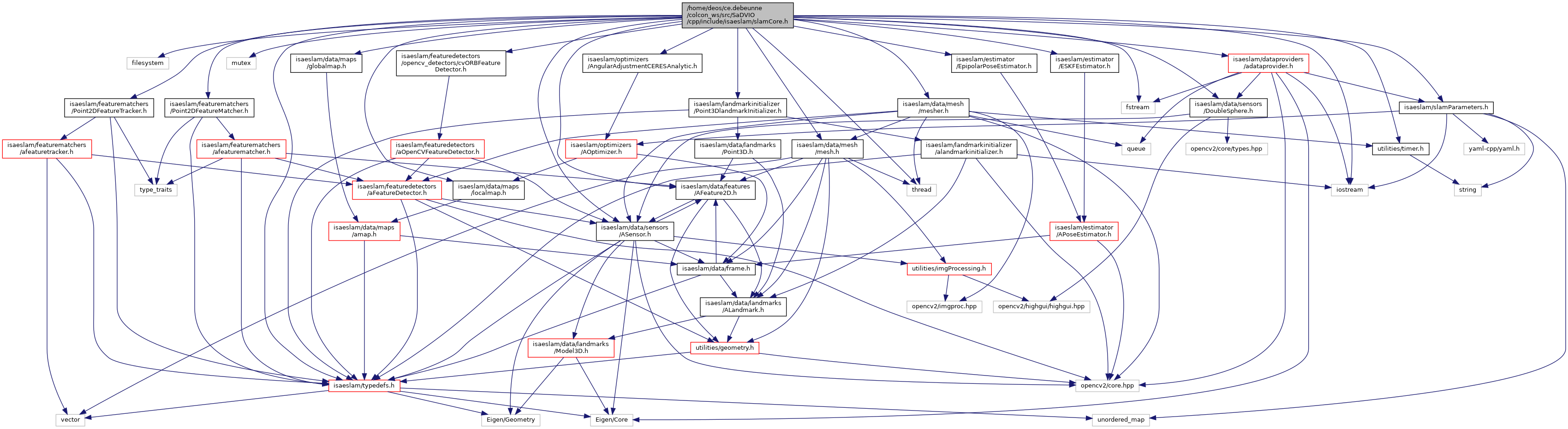
#include <filesystem>#include <fstream>#include <iostream>#include <mutex>#include <thread>#include "isaeslam/data/features/AFeature2D.h"#include "isaeslam/data/maps/globalmap.h"#include "isaeslam/data/maps/localmap.h"#include "isaeslam/data/mesh/mesh.h"#include "isaeslam/data/mesh/mesher.h"#include "isaeslam/data/sensors/ASensor.h"#include "isaeslam/data/sensors/DoubleSphere.h"#include "isaeslam/estimator/ESKFEstimator.h"#include "isaeslam/estimator/EpipolarPoseEstimator.h"#include "isaeslam/featuredetectors/opencv_detectors/cvORBFeatureDetector.h"#include "isaeslam/featurematchers/Point2DFeatureMatcher.h"#include "isaeslam/featurematchers/Point2DFeatureTracker.h"#include "isaeslam/landmarkinitializer/Point3DlandmarkInitializer.h"#include "isaeslam/optimizers/AngularAdjustmentCERESAnalytic.h"#include "isaeslam/slamParameters.h"#include "isaeslam/dataproviders/adataprovider.h"#include "isaeslam/typedefs.h"#include "utilities/timer.h"
Include dependency graph for slamCore.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | isae::SLAMCore |
| The core abstract class of the SLAM system. It handles front-end, back-end and initialization. More... | |
| class | isae::SLAMBiMono |
| A SLAM class for bi-monocular setups. More... | |
| class | isae::SLAMBiMonoVIO |
| A SLAM class for bi-monocular + IMU setups. More... | |
| class | isae::SLAMMonoVIO |
| A SLAM class for monocular + IMU setups. More... | |
| class | isae::SLAMMono |
| A SLAM class for monocular setups. More... | |
| class | isae::SLAMNonOverlappingFov |
| A SLAM class for non overlapping FoV setups. More... | |
Namespaces | |
| isae | |
