An image sensor class that uses the normalized spherical model. More...
#include <Fisheye.h>
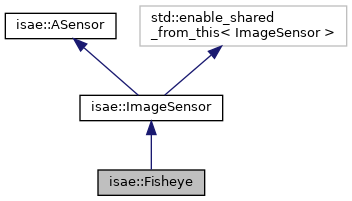
Inheritance diagram for isae::Fisheye:
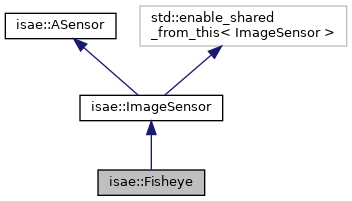
Collaboration diagram for isae::Fisheye:
Public Member Functions | |
| Fisheye (const cv::Mat &image, Eigen::Matrix3d K, std::string model, float rmax) | |
| bool | project (const Eigen::Affine3d &T_w_lmk, const std::shared_ptr< AModel3d > ldmk_model, std::vector< Eigen::Vector2d > &p2ds) override |
| Virtual function to project a landmark in the image plane. More... | |
| bool | project (const Eigen::Affine3d &T_w_lmk, const std::shared_ptr< AModel3d > ldmk_model, const Eigen::Affine3d &T_f_w, std::vector< Eigen::Vector2d > &p2ds) override |
| Virtual function to project a landmark in the image plane with the pose of the frame. More... | |
| bool | project (const Eigen::Affine3d &T_w_lmk, const Eigen::Affine3d &T_f_w, const Eigen::Matrix2d sqrt_info, Eigen::Vector2d &p2d, double *J_proj_frame, double *J_proj_lmk) override |
| Virtual function to project a landmark and compute the Jacobian of the projection. More... | |
| Eigen::Vector3d | getRayCamera (Eigen::Vector2d f) |
| Get the ray in camera coordinates. More... | |
| Eigen::Vector3d | getRay (Eigen::Vector2d f) |
| Get the ray in world coordinates. More... | |
| double | getFocal () override |
| Compute the focal length of the camera. More... | |
 Public Member Functions inherited from isae::ImageSensor Public Member Functions inherited from isae::ImageSensor | |
| ImageSensor () | |
| ~ImageSensor () | |
| bool | hasDepth () |
| cv::Mat | getRawData () |
| void | setPyr (const std::vector< cv::Mat > &img_pyr) |
| const std::vector< cv::Mat > | getPyr () |
| void | applyCLAHE (float clahe_clip) |
| Apply CLAHE (Contrast Limited Adaptive Histogram Equalization) to the image. More... | |
| void | histogramEqualization () |
| Apply histogram equalization to the image. More... | |
| void | imageNormalization () |
| Apply Image normalization to the image. More... | |
| void | applyAGCWD (float alpha) |
| Apply adaptive gamme correction. More... | |
| void | setMask (cv::Mat mask) |
| cv::Mat | getMask () |
| Eigen::Matrix3d | getCalibration () |
| void | addFeature (std::string feature_label, std::shared_ptr< AFeature > f) |
| Add a single feature and compute its bearing vector. More... | |
| void | addFeatures (std::string feature_label, std::vector< std::shared_ptr< AFeature >> features) |
| Add a vector of features and compute their bearing vectors. More... | |
| void | removeFeature (std::shared_ptr< AFeature > f) |
| typed_vec_features & | getFeatures () |
| void | purgeFeatures (std::string feature_label) |
| Clear all features of a specific type. More... | |
| std::vector< std::shared_ptr< AFeature > > & | getFeatures (std::string feature_label) |
| Get features of a specific type. More... | |
| Public Member Functions inherited from isae::ASensor | |
| ASensor (std::string type) | |
| ~ASensor () | |
| std::string | getType () |
| void | setFrame (std::shared_ptr< Frame > frame) |
| std::shared_ptr< Frame > | getFrame () |
| void | setFrame2SensorTransform (Eigen::Affine3d T_s_f) |
| Eigen::Affine3d | getFrame2SensorTransform () |
| Eigen::Affine3d | getWorld2SensorTransform () |
| Eigen::Affine3d | getSensor2WorldTransform () |
Additional Inherited Members | |
| Protected Attributes inherited from isae::ImageSensor | |
| Eigen::Matrix3d | _calibration |
| intrinsic matrix of the camera (sensor ?) More... | |
| cv::Mat | _raw_data |
| Raw image data. More... | |
| std::vector< cv::Mat > | _img_pyr |
| Image pyramid for multi-scale processing. More... | |
| cv::Mat | _mask |
| Mask to ignore. More... | |
| typed_vec_features | _features |
| Typed vector of features. More... | |
| bool | _has_depth |
| Is it a RGBD ? More... | |
| std::mutex | _cam_mtx |
| Protected Attributes inherited from isae::ASensor | |
| std::weak_ptr< Frame > | _frame |
| Eigen::Affine3d | _T_s_f |
| std::string | _type |
| std::mutex | _sensor_mtx |
Detailed Description
An image sensor class that uses the normalized spherical model.
Constructor & Destructor Documentation
◆ Fisheye()
|
inline |
Member Function Documentation
◆ getFocal()
|
inlineoverridevirtual |
Compute the focal length of the camera.
Virtual function because it depends on the camera model.
Implements isae::ImageSensor.
◆ getRay()
|
virtual |
Get the ray in world coordinates.
Implements isae::ImageSensor.
◆ getRayCamera()
|
virtual |
Get the ray in camera coordinates.
Implements isae::ImageSensor.
◆ project() [1/3]
|
overridevirtual |
Virtual function to project a landmark and compute the Jacobian of the projection.
Implements isae::ImageSensor.
◆ project() [2/3]
|
overridevirtual |
Virtual function to project a landmark in the image plane with the pose of the frame.
Implements isae::ImageSensor.
◆ project() [3/3]
|
overridevirtual |
Virtual function to project a landmark in the image plane.
Implements isae::ImageSensor.
The documentation for this class was generated from the following files:
- /home/deos/ce.debeunne/colcon_ws/src/SaDVIO/cpp/include/isaeslam/data/sensors/Fisheye.h
- /home/deos/ce.debeunne/colcon_ws/src/SaDVIO/cpp/src/data/sensors/fisheye.cpp
