Abstract class for all sensors. More...
#include <ASensor.h>
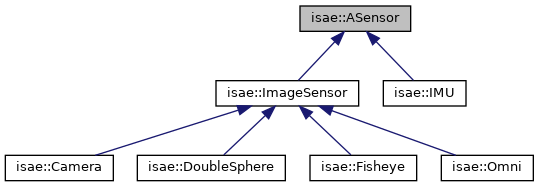
Inheritance diagram for isae::ASensor:
Public Member Functions | |
| ASensor (std::string type) | |
| ~ASensor () | |
| std::string | getType () |
| void | setFrame (std::shared_ptr< Frame > frame) |
| std::shared_ptr< Frame > | getFrame () |
| void | setFrame2SensorTransform (Eigen::Affine3d T_s_f) |
| Eigen::Affine3d | getFrame2SensorTransform () |
| Eigen::Affine3d | getWorld2SensorTransform () |
| Eigen::Affine3d | getSensor2WorldTransform () |
Protected Attributes | |
| std::weak_ptr< Frame > | _frame |
| Eigen::Affine3d | _T_s_f |
| std::string | _type |
| std::mutex | _sensor_mtx |
Detailed Description
Abstract class for all sensors.
This class provides a common interface for all sensors in the SLAM system. It contains a reference to a frame, its extrinsic and its type.
Constructor & Destructor Documentation
◆ ASensor()
|
inline |
◆ ~ASensor()
|
inline |
Member Function Documentation
◆ getFrame()
|
inline |
◆ getFrame2SensorTransform()
|
inline |
◆ getSensor2WorldTransform()
| Eigen::Affine3d isae::ASensor::getSensor2WorldTransform | ( | ) |
◆ getType()
|
inline |
◆ getWorld2SensorTransform()
| Eigen::Affine3d isae::ASensor::getWorld2SensorTransform | ( | ) |
◆ setFrame()
|
inline |
◆ setFrame2SensorTransform()
|
inline |
Member Data Documentation
◆ _frame
|
protected |
◆ _sensor_mtx
|
protected |
◆ _T_s_f
|
protected |
◆ _type
|
protected |
The documentation for this class was generated from the following files:
- /home/deos/ce.debeunne/colcon_ws/src/SaDVIO/cpp/include/isaeslam/data/sensors/ASensor.h
- /home/deos/ce.debeunne/colcon_ws/src/SaDVIO/cpp/src/data/sensors/ASensor.cpp
