AOpenCVFeatureDetector class for detecting and computing features using OpenCV. More...
#include <aOpenCVFeatureDetector.h>
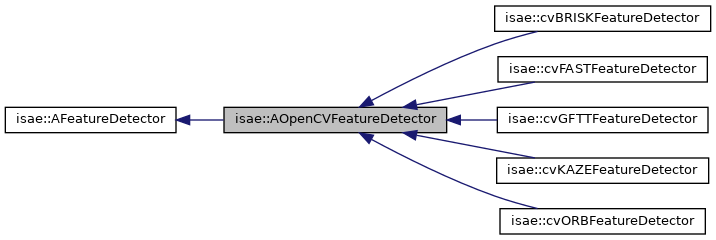
Inheritance diagram for isae::AOpenCVFeatureDetector:
Collaboration diagram for isae::AOpenCVFeatureDetector:
Public Member Functions | |
| AOpenCVFeatureDetector (int n, int n_per_cell) | |
| void | detectAndCompute (const cv::Mat &img, const cv::Mat &mask, std::vector< cv::KeyPoint > &keypoints, cv::Mat &descriptors, int n_points=0) |
| Virtual function to detect and compute features in an image. More... | |
| void | computeDescriptor (const cv::Mat &img, std::vector< std::shared_ptr< AFeature >> &features) |
| Virtual function to compute descriptors for a set of features. More... | |
| void | retainBest (std::vector< cv::KeyPoint > &_keypoints, int n) |
| Retain the n best keypoints based on their response. More... | |
| std::vector< std::shared_ptr< AFeature > > | detectAndComputeGrid (const cv::Mat &img, const cv::Mat &mask, std::vector< std::shared_ptr< AFeature >> existing_features=std::vector< std::shared_ptr< AFeature >>()) |
| Virtual function to detect and compute features in a grid (bucketting). More... | |
 Public Member Functions inherited from isae::AFeatureDetector Public Member Functions inherited from isae::AFeatureDetector | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | AFeatureDetector () |
| AFeatureDetector (int n, int n_per_cell) | |
| ~AFeatureDetector () | |
| virtual void | init ()=0 |
| Virtual function to initialize the feature detector. More... | |
| virtual double | computeDist (const cv::Mat &desc1, const cv::Mat &desc2) const =0 |
| Virtual function to compute the distance between two feature descriptors. More... | |
| size_t | getNbDesiredFeatures () |
| double | getMaxMatchingDist () const |
| bool | getFeaturesInBox (int x, int y, int w, int h, const std::vector< std::shared_ptr< AFeature >> &features, std::vector< std::shared_ptr< AFeature >> &features_in_box) const |
| Get features from a feature set in a bounding box defined by (x, y, w, h). More... | |
| void | deleteUndescribedFeatures (std::vector< std::shared_ptr< AFeature >> &features) |
Protected Attributes | |
| cv::Ptr< cv::FeatureDetector > | _detector |
| Stores the opencv detector. More... | |
| cv::Ptr< cv::DescriptorExtractor > | _descriptor |
| Stores the opencv descriptor extractor. More... | |
| Protected Attributes inherited from isae::AFeatureDetector | |
| int | _n_total |
| the maximum amount of features the detector should find for any given image More... | |
| int | _n_per_cell |
| the number of features per cell More... | |
| double | _max_matching_dist |
| distance threshold for matching More... | |
Additional Inherited Members | |
| Static Public Member Functions inherited from isae::AFeatureDetector | |
| static void | KeypointToFeature (std::vector< cv::KeyPoint > keypoints, cv::Mat descriptors, std::vector< std::shared_ptr< AFeature >> &features, const std::string &featurelabel="pointxd") |
| Convert OpenCV keypoints and descriptors to a vector of AFeature pointers. More... | |
| static void | FeatureToKeypoint (std::vector< std::shared_ptr< AFeature >> features, std::vector< cv::KeyPoint > &keypoints, cv::Mat &descriptors) |
| Convert a vector of AFeature pointers to OpenCV keypoints and descriptors. More... | |
| static void | FeatureToP2f (std::vector< std::shared_ptr< AFeature >> features, std::vector< cv::Point2f > &p2fs) |
| Convert a vector of AFeature pointers to a vector of cv::Point2f. More... | |
Detailed Description
AOpenCVFeatureDetector class for detecting and computing features using OpenCV.
Constructor & Destructor Documentation
◆ AOpenCVFeatureDetector()
|
inline |
Member Function Documentation
◆ computeDescriptor()
|
virtual |
Virtual function to compute descriptors for a set of features.
- Parameters
-
img The input image from which to compute descriptors. features A vector of features for which to compute descriptors.
Implements isae::AFeatureDetector.
◆ detectAndCompute()
|
virtual |
Virtual function to detect and compute features in an image.
- Parameters
-
img The input image in which to detect features. mask An optional mask to specify regions of interest in the image. keypoints Output vector to store detected keypoints. descriptors Output matrix to store computed descriptors. n_points The number of points to detect (optional, default is 0 which means all).
Implements isae::AFeatureDetector.
◆ detectAndComputeGrid()
|
virtual |
Virtual function to detect and compute features in a grid (bucketting).
- Parameters
-
img The input image in which to detect features. mask An optional mask to specify regions of interest in the image. existing_features A vector of existing features to consider (optional).
Implements isae::AFeatureDetector.
Reimplemented in isae::cvGFTTFeatureDetector.
◆ retainBest()
| void isae::AOpenCVFeatureDetector::retainBest | ( | std::vector< cv::KeyPoint > & | _keypoints, |
| int | n | ||
| ) |
Retain the n best keypoints based on their response.
Member Data Documentation
◆ _descriptor
|
protected |
Stores the opencv descriptor extractor.
◆ _detector
|
protected |
Stores the opencv detector.
The documentation for this class was generated from the following files:
- /home/deos/ce.debeunne/colcon_ws/src/SaDVIO/cpp/include/isaeslam/featuredetectors/aOpenCVFeatureDetector.h
- /home/deos/ce.debeunne/colcon_ws/src/SaDVIO/cpp/src/featuredetectors/aOpenCVFeatureDetector.cpp
