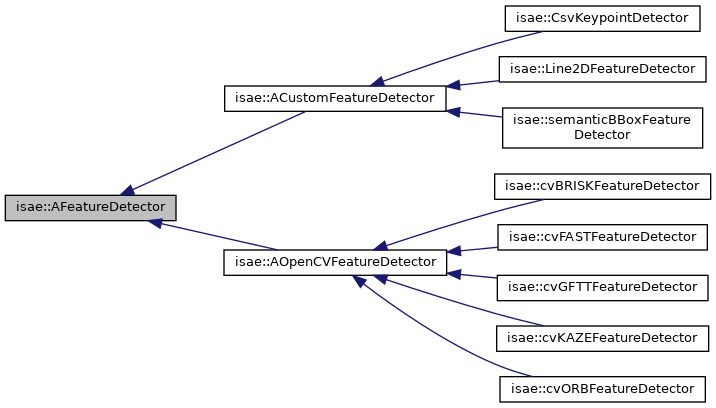
Abstract class for feature detectors. More...
#include <aFeatureDetector.h>
Public Member Functions | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | AFeatureDetector () |
| AFeatureDetector (int n, int n_per_cell) | |
| ~AFeatureDetector () | |
| virtual void | init ()=0 |
| Virtual function to initialize the feature detector. More... | |
| virtual void | detectAndCompute (const cv::Mat &img, const cv::Mat &mask, std::vector< cv::KeyPoint > &keypoints, cv::Mat &descriptors, int n_points=0)=0 |
| Virtual function to detect and compute features in an image. More... | |
| virtual void | computeDescriptor (const cv::Mat &img, std::vector< std::shared_ptr< AFeature >> &features)=0 |
| Virtual function to compute descriptors for a set of features. More... | |
| virtual std::vector< std::shared_ptr< AFeature > > | detectAndComputeGrid (const cv::Mat &img, const cv::Mat &mask, std::vector< std::shared_ptr< AFeature >> existing_features=std::vector< std::shared_ptr< AFeature >>())=0 |
| Virtual function to detect and compute features in a grid (bucketting). More... | |
| virtual double | computeDist (const cv::Mat &desc1, const cv::Mat &desc2) const =0 |
| Virtual function to compute the distance between two feature descriptors. More... | |
| size_t | getNbDesiredFeatures () |
| double | getMaxMatchingDist () const |
| bool | getFeaturesInBox (int x, int y, int w, int h, const std::vector< std::shared_ptr< AFeature >> &features, std::vector< std::shared_ptr< AFeature >> &features_in_box) const |
| Get features from a feature set in a bounding box defined by (x, y, w, h). More... | |
| void | deleteUndescribedFeatures (std::vector< std::shared_ptr< AFeature >> &features) |
Static Public Member Functions | |
| static void | KeypointToFeature (std::vector< cv::KeyPoint > keypoints, cv::Mat descriptors, std::vector< std::shared_ptr< AFeature >> &features, const std::string &featurelabel="pointxd") |
| Convert OpenCV keypoints and descriptors to a vector of AFeature pointers. More... | |
| static void | FeatureToKeypoint (std::vector< std::shared_ptr< AFeature >> features, std::vector< cv::KeyPoint > &keypoints, cv::Mat &descriptors) |
| Convert a vector of AFeature pointers to OpenCV keypoints and descriptors. More... | |
| static void | FeatureToP2f (std::vector< std::shared_ptr< AFeature >> features, std::vector< cv::Point2f > &p2fs) |
| Convert a vector of AFeature pointers to a vector of cv::Point2f. More... | |
Protected Attributes | |
| int | _n_total |
| the maximum amount of features the detector should find for any given image More... | |
| int | _n_per_cell |
| the number of features per cell More... | |
| double | _max_matching_dist |
| distance threshold for matching More... | |
Detailed Description
Abstract class for feature detectors.
This class defines the interface for feature detection and descriptor computation.
Constructor & Destructor Documentation
◆ AFeatureDetector() [1/2]
|
inline |
◆ AFeatureDetector() [2/2]
|
inline |
◆ ~AFeatureDetector()
|
inline |
Member Function Documentation
◆ computeDescriptor()
|
pure virtual |
Virtual function to compute descriptors for a set of features.
- Parameters
-
img The input image from which to compute descriptors. features A vector of features for which to compute descriptors.
Implemented in isae::ACustomFeatureDetector, isae::CsvKeypointDetector, isae::Line2DFeatureDetector, isae::semanticBBoxFeatureDetector, and isae::AOpenCVFeatureDetector.
◆ computeDist()
|
pure virtual |
Virtual function to compute the distance between two feature descriptors.
- Parameters
-
desc1 The first feature descriptor. desc2 The second feature descriptor.
Implemented in isae::CsvKeypointDetector, isae::Line2DFeatureDetector, isae::cvBRISKFeatureDetector, isae::cvFASTFeatureDetector, isae::cvGFTTFeatureDetector, isae::cvKAZEFeatureDetector, isae::semanticBBoxFeatureDetector, and isae::cvORBFeatureDetector.
◆ deleteUndescribedFeatures()
| void isae::AFeatureDetector::deleteUndescribedFeatures | ( | std::vector< std::shared_ptr< AFeature >> & | features | ) |
◆ detectAndCompute()
|
pure virtual |
Virtual function to detect and compute features in an image.
- Parameters
-
img The input image in which to detect features. mask An optional mask to specify regions of interest in the image. keypoints Output vector to store detected keypoints. descriptors Output matrix to store computed descriptors. n_points The number of points to detect (optional, default is 0 which means all).
Implemented in isae::ACustomFeatureDetector, and isae::AOpenCVFeatureDetector.
◆ detectAndComputeGrid()
|
pure virtual |
Virtual function to detect and compute features in a grid (bucketting).
- Parameters
-
img The input image in which to detect features. mask An optional mask to specify regions of interest in the image. existing_features A vector of existing features to consider (optional).
Implemented in isae::AOpenCVFeatureDetector, isae::ACustomFeatureDetector, and isae::cvGFTTFeatureDetector.
◆ FeatureToKeypoint()
|
static |
◆ FeatureToP2f()
|
static |
◆ getFeaturesInBox()
| bool isae::AFeatureDetector::getFeaturesInBox | ( | int | x, |
| int | y, | ||
| int | w, | ||
| int | h, | ||
| const std::vector< std::shared_ptr< AFeature >> & | features, | ||
| std::vector< std::shared_ptr< AFeature >> & | features_in_box | ||
| ) | const |
Get features from a feature set in a bounding box defined by (x, y, w, h).
- Parameters
-
x The x-coordinate of the top-left corner of the bounding box. y The y-coordinate of the top-left corner of the bounding box. w The width of the bounding box. h The height of the bounding box. features The vector of features to search in. features_in_box The vector to store the features found in the bounding box.
◆ getMaxMatchingDist()
|
inline |
◆ getNbDesiredFeatures()
|
inline |
◆ init()
|
pure virtual |
Virtual function to initialize the feature detector.
This method should be called before using the detector.
Implemented in isae::CsvKeypointDetector, isae::Line2DFeatureDetector, isae::cvBRISKFeatureDetector, isae::cvFASTFeatureDetector, isae::cvGFTTFeatureDetector, isae::cvKAZEFeatureDetector, isae::cvORBFeatureDetector, and isae::semanticBBoxFeatureDetector.
◆ KeypointToFeature()
|
static |
Convert OpenCV keypoints and descriptors to a vector of AFeature pointers.
- Parameters
-
keypoints The input vector of OpenCV keypoints. descriptors The input matrix of descriptors corresponding to the keypoints. features Output vector to store the converted AFeature pointers. featurelabel Optional label for the features (default is "pointxd").
Member Data Documentation
◆ _max_matching_dist
|
protected |
distance threshold for matching
◆ _n_per_cell
|
protected |
the number of features per cell
◆ _n_total
|
protected |
the maximum amount of features the detector should find for any given image
The documentation for this class was generated from the following files:
- /home/deos/ce.debeunne/colcon_ws/src/SaDVIO/cpp/include/isaeslam/featuredetectors/aFeatureDetector.h
- /home/deos/ce.debeunne/colcon_ws/src/SaDVIO/cpp/src/featuredetectors/aFeatureDetector.cpp
