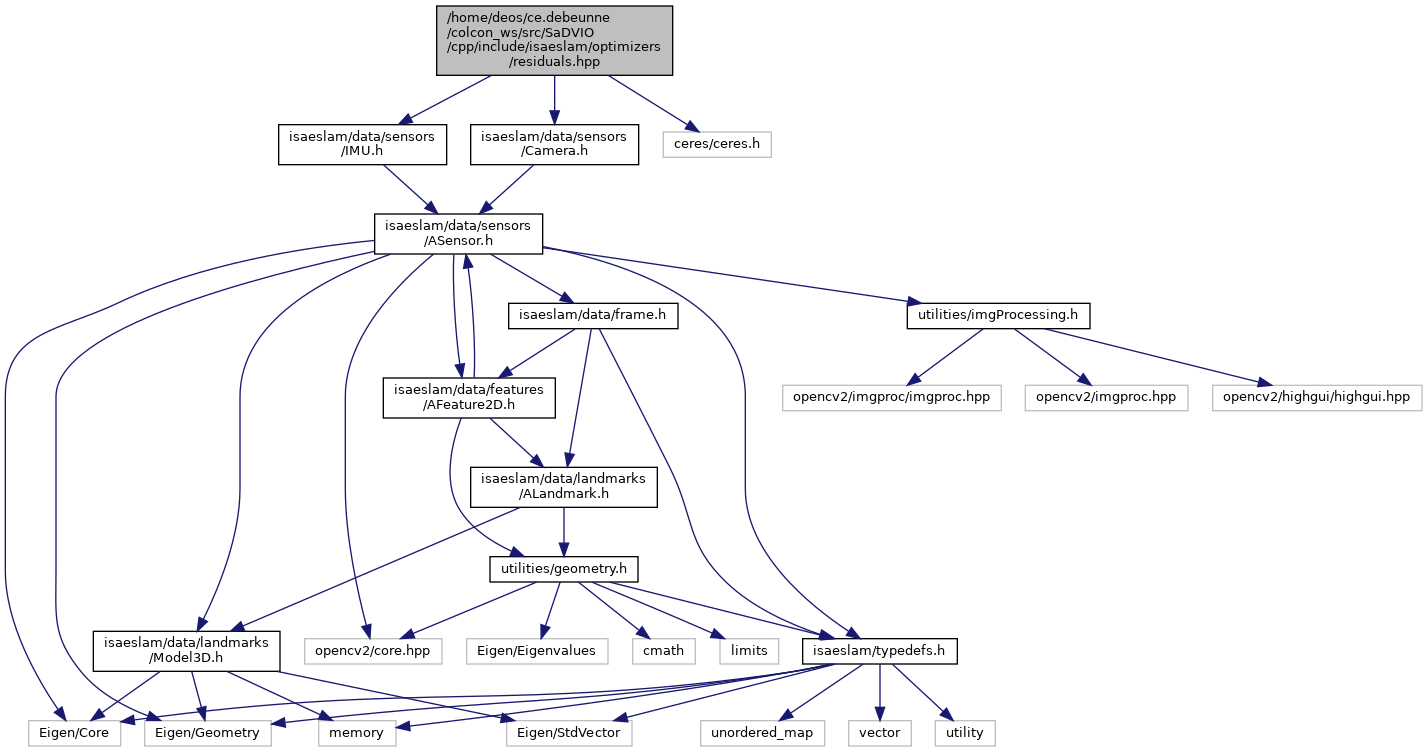
#include "isaeslam/data/sensors/Camera.h"#include "isaeslam/data/sensors/IMU.h"#include <ceres/ceres.h>
Include dependency graph for residuals.hpp:
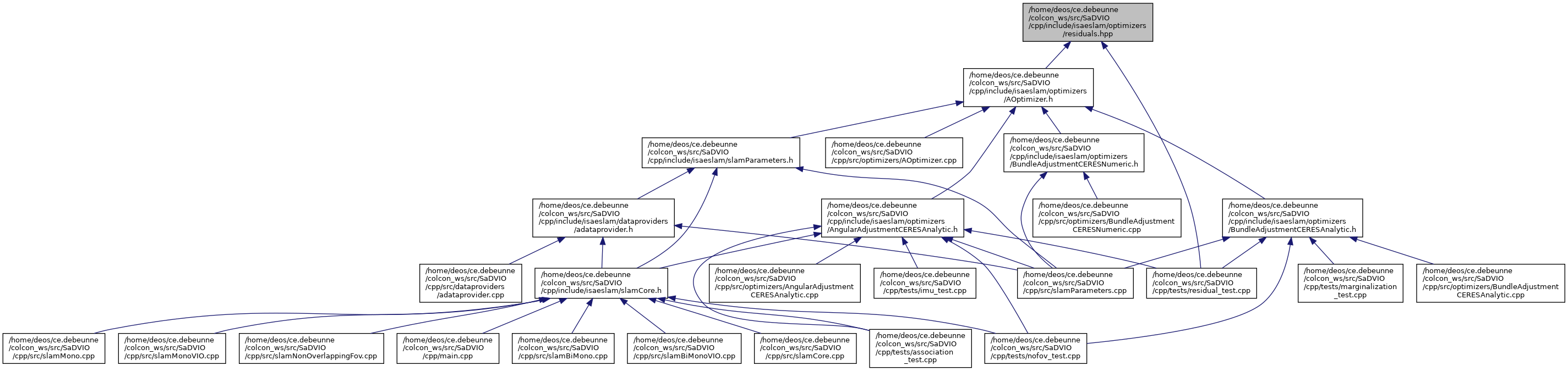
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | isae::Motion2DFactor |
| A cost function to impose a constraint on 2D motion. More... | |
| class | isae::Relative6DPose |
| A cost function for 6DoF relative pose constraint, the parameters are the delta pose of the two related poses. More... | |
| class | isae::IMUFactor |
| A cost function for IMU pre-integration factor, parameters are delta updates. More... | |
| class | isae::IMUBiasFactor |
| IMU bias cost function that takes into account random walk behaviour. More... | |
| class | isae::IMUFactorInit |
| Pre integration IMU factor for initialization, the parameters optimized are: scale, roll, pitch, velocities and biases. More... | |
| class | isae::IMUFactorInitBis |
| An experimental IMU factor refining only roll, pitch, biases and scale. More... | |
| class | isae::Landmark3DPrior |
| A factor for absolute 3D position constraint on a punctual landmark. More... | |
| class | isae::LandmarkToLandmarkFactor |
| 3D relative translation factor between 3D punctual landmarks More... | |
| class | isae::PoseToLandmarkFactor |
| Relative 3D translation between a 6DoF frame and a punctual landmark. More... | |
| class | isae::PosePriordx |
| Absolute 6DoF pose prior factor. More... | |
| class | isae::IMUPriordx |
| An absolute prior on an Inertial state, including pose, velocity and biases. More... | |
| class | isae::scalePrior |
| Prior on a 1D parameter (e.g. scale) More... | |
Namespaces | |
| isae | |
