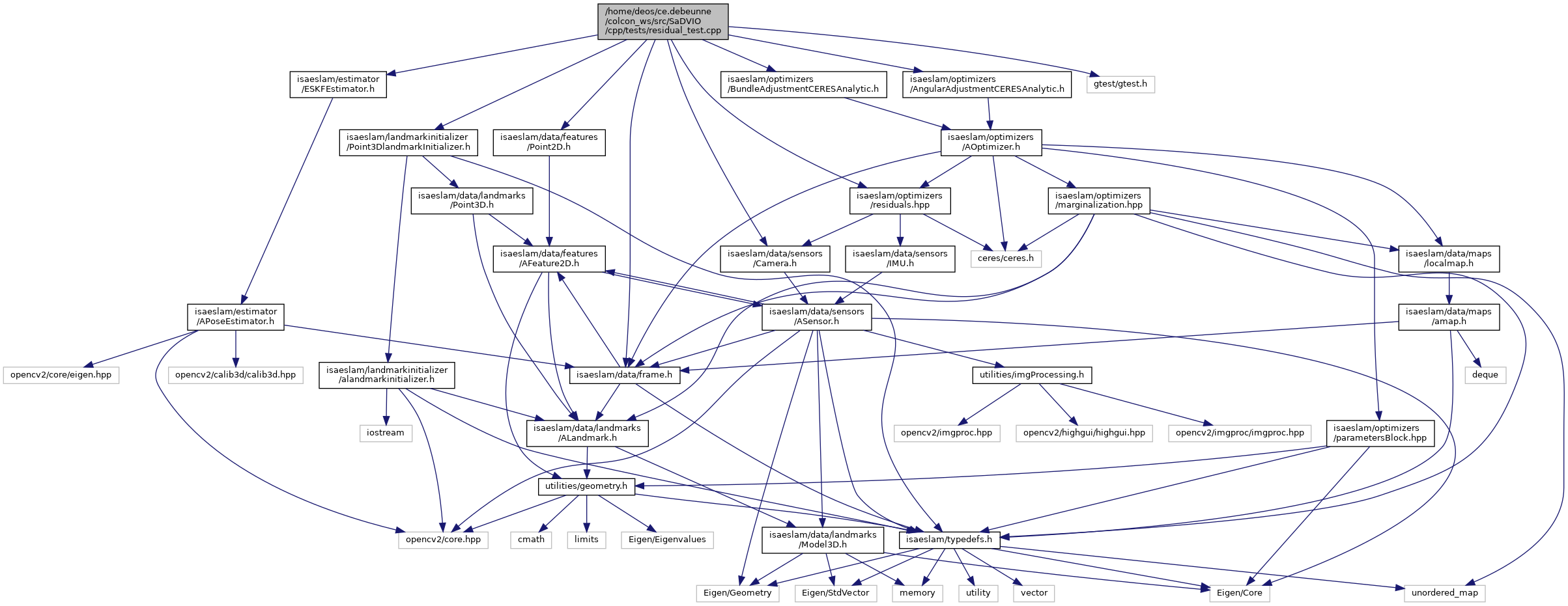
#include "isaeslam/data/features/Point2D.h"#include "isaeslam/data/frame.h"#include "isaeslam/data/sensors/Camera.h"#include "isaeslam/estimator/ESKFEstimator.h"#include "isaeslam/landmarkinitializer/Point3DlandmarkInitializer.h"#include "isaeslam/optimizers/AngularAdjustmentCERESAnalytic.h"#include "isaeslam/optimizers/BundleAdjustmentCERESAnalytic.h"#include "isaeslam/optimizers/residuals.hpp"#include <gtest/gtest.h>
Include dependency graph for residual_test.cpp:
Classes | |
| class | isae::ResidualTest |
Namespaces | |
| isae | |
Functions | |
| isae::TEST_F (ResidualTest, PriorResidual) | |
| isae::TEST_F (ResidualTest, reprojTest) | |
| isae::TEST_F (ResidualTest, angularTest) | |
| isae::TEST_F (ResidualTest, scaleTest) | |
| isae::TEST_F (ResidualTest, PoseToLandmarkResidual) | |
| isae::TEST_F (ResidualTest, RelativePose6DResidual) | |
| isae::TEST_F (ResidualTest, ESKFLmkTest) | |
