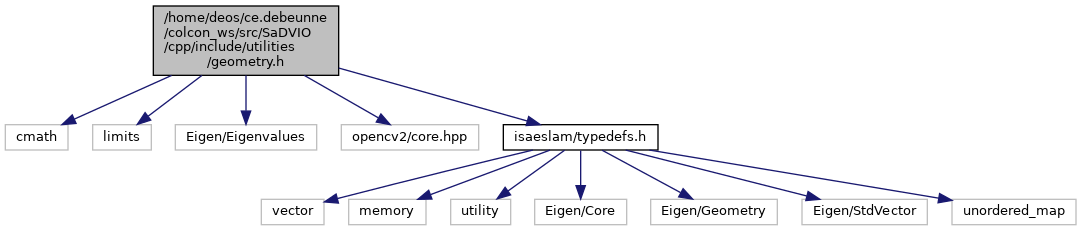
#include <cmath>#include <limits>#include <Eigen/Eigenvalues>#include <opencv2/core.hpp>#include "isaeslam/typedefs.h"
Include dependency graph for geometry.h:
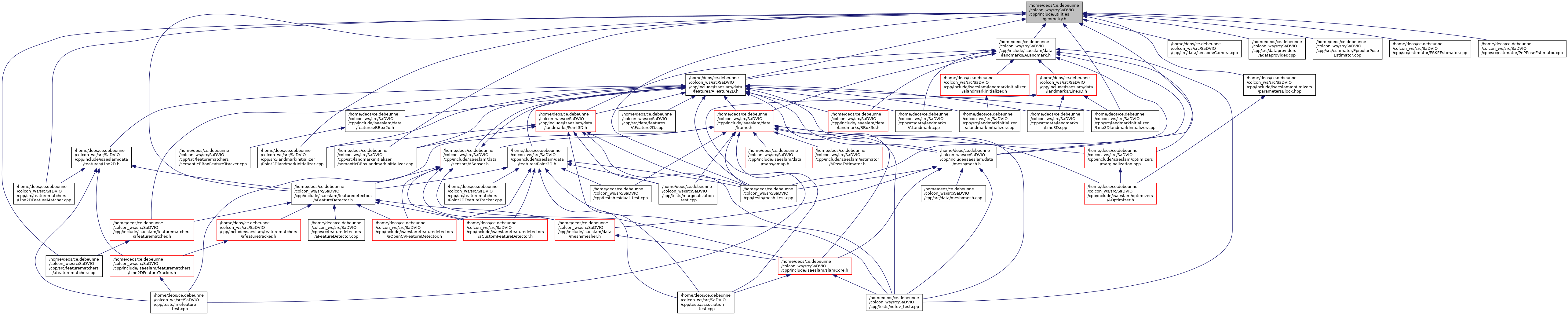
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| isae | |
| isae::geometry | |
Functions | |
| template<typename Derived > | |
| Eigen::Matrix3d | isae::geometry::skewMatrix (const Eigen::MatrixBase< Derived > &w) |
| Computes the skew matrix of a given 3D vector. More... | |
| Eigen::Vector3d | isae::geometry::FromskewMatrix (const Eigen::Matrix3d &skew) |
| Computes the 3D vector from a given skew matrix. More... | |
| Eigen::Matrix3d | isae::geometry::so3_rightJacobian (const Eigen::Vector3d &w) |
| Compute the right jacobian on SO(3) manifold. More... | |
| Eigen::Matrix3d | isae::geometry::so3_leftJacobian (const Eigen::Vector3d &w) |
| Compute the left jacobian on SO(3) manifold. More... | |
| Eigen::Vector3d | isae::geometry::rotationMatrixToEulerAnglesEigen (Eigen::Matrix3d R) |
| Compute the Euler angle representation of a rotation matrix. More... | |
| Eigen::Matrix3d | isae::geometry::xFront2zFront () |
| Rotation matrix that rotates a right handed frame with X front to a frame with Z front. More... | |
| Eigen::Matrix3d | isae::geometry::zFront2xFront () |
| Rotation matrix that rotates a right handed frame with Z front to a frame with X front. More... | |
| Eigen::Matrix3d | isae::geometry::xRight2xFront () |
| Rotation matrix that rotates a right handed frame with X right to a frame with X front. More... | |
| Eigen::Matrix3d | isae::geometry::directionVector2Rotation (Eigen::Vector3d v, const Eigen::Vector3d &reference_vector=Eigen::Vector3d(1, 0, 0)) |
| Gives the rotation matrix from a direction vector. More... | |
| Eigen::Vector3d | isae::geometry::Rotation2directionVector (const Eigen::Matrix3d &R, const Eigen::Vector3d &reference_vector=Eigen::Vector3d(1, 0, 0)) |
| Gives the direction vector from a rotation matrix. More... | |
| Eigen::Matrix3d | isae::geometry::exp_so3 (const Eigen::Vector3d &v) |
| Compute the exponential of the SO(3) manifold. More... | |
| Eigen::Vector3d | isae::geometry::log_so3 (const Eigen::Matrix3d &M) |
| Compute the logarithm of the SO(3) manifold. More... | |
| Vector6d | isae::geometry::se3_RTtoVec6d (Eigen::Affine3d RT) |
| Compute the logarithm of the SO(3)xT(3) composite manifold. More... | |
| Eigen::Affine3d | isae::geometry::se3_Vec6dtoRT (Vector6d pose) |
| Compute the Exponential of the SO(3)xT(3) composite manifold. More... | |
| Eigen::Affine3d | isae::geometry::se3_doubleVec6dtoRT (const double *pose) |
| Compute the Exponential of the SO(3)xT(3) composite manifold from a double*. More... | |
| Eigen::Affine3d | isae::geometry::se3_doubleVec3dtoRT (const double *p3d) |
| Turns a point 3d in double* into an Affine3d with Id rotation. More... | |
| template<typename T > | |
| Eigen::Transform< T, 3, 4 > | isae::geometry::se3_doubleVec6dtoRT (const T *pose) |
| Compute the logarithm of the SO(3)xT(3) composite manifold from a double*. More... | |
| double | isae::geometry::getAngle (Eigen::Vector3d p, Eigen::Vector3d p1, Eigen::Vector3d p2) |
| Get the angle formed by the segments p-p1 and p-p2. More... | |
| template<typename Derived = Eigen::VectorXd> | |
| bool | isae::geometry::pointInTriangle (Derived pt, std::vector< Derived > triangle) |
| Check if a point is in a triangle with the barycentric technique. More... | |
| Eigen::Matrix2d | isae::geometry::cov2dTriangle (std::vector< Eigen::Vector2d > triangle) |
| Computes the covariance of a 2D triangle according to CGAL library. More... | |
| double | isae::geometry::areaTriangle (std::vector< Eigen::Vector2d > triangle) |
| Compute the area of a 2D triangle. More... | |
| Eigen::MatrixXd | isae::geometry::J_norm (Eigen::Vector3d X) |
| Eigen::Matrix3d | isae::geometry::J_normalization (Eigen::Vector3d X) |
| Eigen::Matrix3d | isae::geometry::J_XcrossA (Eigen::Vector3d A) |
| Eigen::Matrix3d | isae::geometry::J_AcrossX (Eigen::Vector3d A) |
| Eigen::Matrix3d | isae::geometry::J_Rexpwt (Eigen::Matrix3d R, Eigen::Matrix3d expw, Eigen::Vector3d t) |
